The Evolution of Planetary Robotics: Learning from “Human” Errors
Space exploration is often framed as a triumph of precision engineering and flawless execution. However, the reality of operating hardware 140 million miles from Earth is far more unpredictable. Even the most sophisticated machines, like NASA’s Curiosity rover, encounter problems that feel remarkably mundane—like getting a piece of “gum” stuck to a shoe.

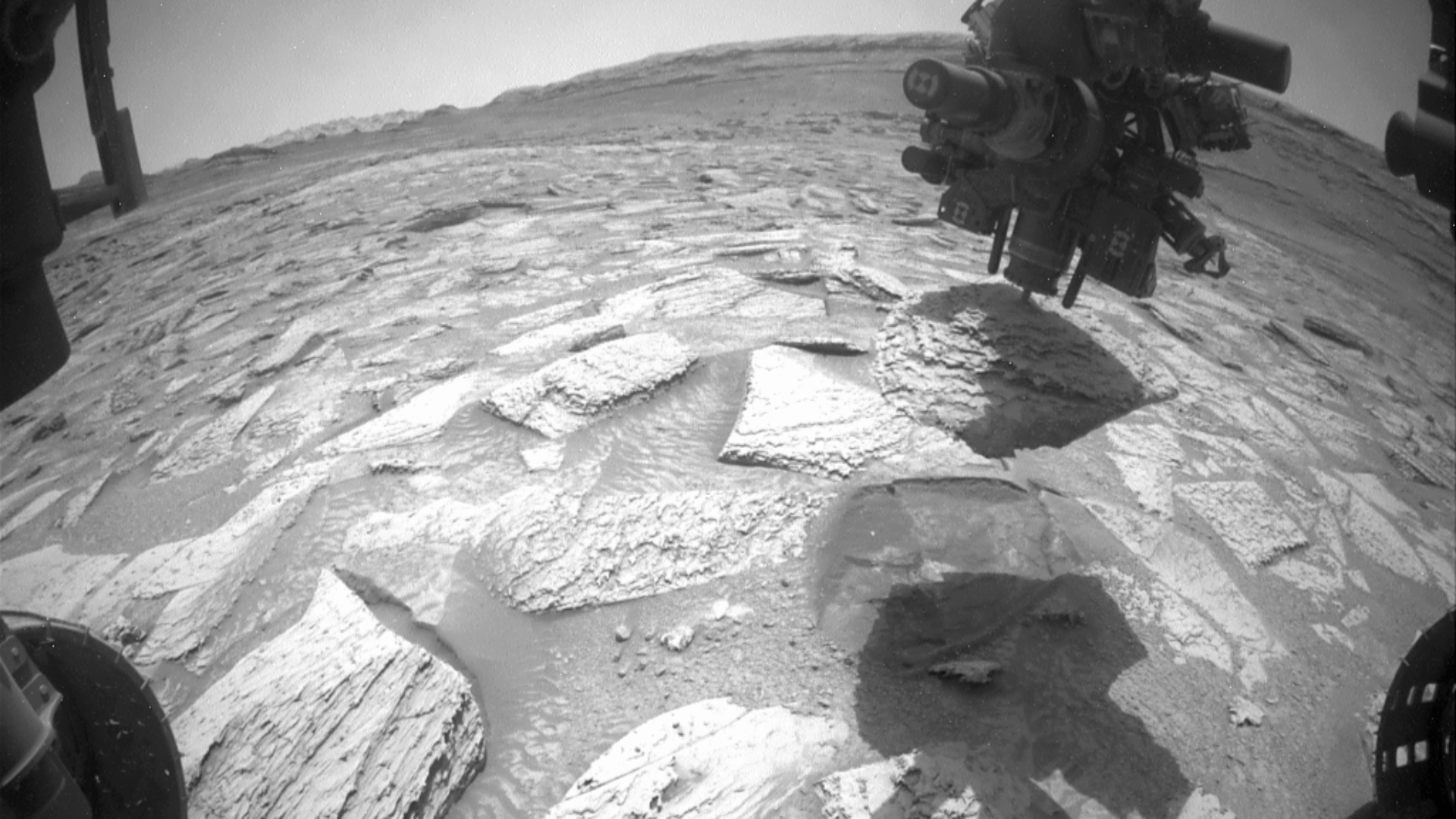
A recent incident involving a Martian rock nicknamed “Atacama” highlights a critical theme in the future of robotics: the gap between simulated laboratory success and the chaotic reality of alien geology. When Curiosity attempted to sample the rock, it didn’t just take a powder sample; it accidentally yanked the entire 28.6-pound formation out of the ground.
The rock, measuring roughly 1.5 feet wide and 6 inches thick, remained stubbornly attached to the drill sleeve. This event serves as a prime case study for how engineers must approach the “unknown unknowns” of deep-space exploration.
Moving Toward Autonomous Recovery Systems
Currently, solving a problem on Mars requires a high-stakes game of remote piloting. In the case of the Atacama rock, engineers had to iteratively test solutions from Earth: first vibrating the drill, then reorienting the arm, and finally combining tilting, rotating, and spinning the bit to free the tool.
The future trend in planetary robotics is a shift from this manual remote-control model toward autonomous recovery systems. Instead of waiting days for a sequence of commands to travel across the vacuum of space, future rovers will likely utilize onboard AI to detect “stuck” states in real-time.
AI-Driven Iterative Troubleshooting
Imagine a rover that can sense the specific resistance of a rock and autonomously cycle through a library of recovery maneuvers—vibrating, spinning, or tilting—until the obstruction is cleared. This would reduce the risk of mission-critical failures and allow for faster scientific progress.

By analyzing the data from Curiosity’s 13-year tenure on the Red Planet, developers can create more resilient software that anticipates geological anomalies rather than simply reacting to them.
Designing for the Unpredictable: The Future of Deep-Space Sampling
The Atacama incident reveals a need for more adaptive sampling tools. When a drill sleeve becomes a “handle” for a 28-pound rock, it puts the entire robotic arm at risk. Future missions will likely prioritize “fail-safe” sampling mechanisms.
One potential trend is the development of modular sampling bits that can be jettisoned or replaced if they become permanently fused to a geological sample. This ensures that a single stubborn rock cannot jeopardize a multibillion-dollar mission.
we can expect to see an increase in multi-modal sensing. Before a drill even touches the surface, advanced spectroscopic and ultrasonic imaging could provide a “density map” of the rock, warning the rover if the material is more likely to fracture as a single block rather than pulverize into powder.
The Long-Duration Reliability Challenge
Maintaining hardware for over a decade in a vacuum is an achievement in itself. The future of space exploration relies on materials that can withstand the thermal expansion and contraction caused by extreme Martian temperature swings without losing the precision required for drilling.
For more on how NASA manages these risks, you can explore the NASA Science archives to see how previous mission failures have informed current designs.
Frequently Asked Questions
Why did the rock stay attached to the drill?
Instead of breaking apart cleanly during the sampling process, the rock remained attached to the drill sleeve, causing the rover to lift the entire formation when the arm retracted.

How do engineers fix problems from millions of miles away?
They use remote piloting, sending sequences of commands to the rover to perform specific movements, such as vibrating the drill or rotating the robotic arm, to solve the problem.
What are the biggest environmental threats to Mars rovers?
The primary threats include intense radiation, furious dust storms, and extreme cold, with temperatures dropping to -200 degrees Fahrenheit.
What do you think about the future of AI in space?
Should rovers be given full autonomy to solve mechanical problems, or should humans always hold the remote? Let us know your thoughts in the comments below or subscribe to our newsletter for more deep-dives into space tech!
Keep reading