Mars Rover Innovation: Nature’s Blueprint for Extraterrestrial Exploration
Navigating the Martian surface is arguably one of the most difficult engineering challenges in human history. With landscapes dominated by treacherous, loose sand, steep inclines and jagged terrain, traditional rover wheels often find themselves spinning in place or digging a grave for multi-million dollar equipment. To solve this, engineers are turning to an unlikely mentor: the sandfish skink.
Borrowing from Biology: The Sandfish Skink Technique
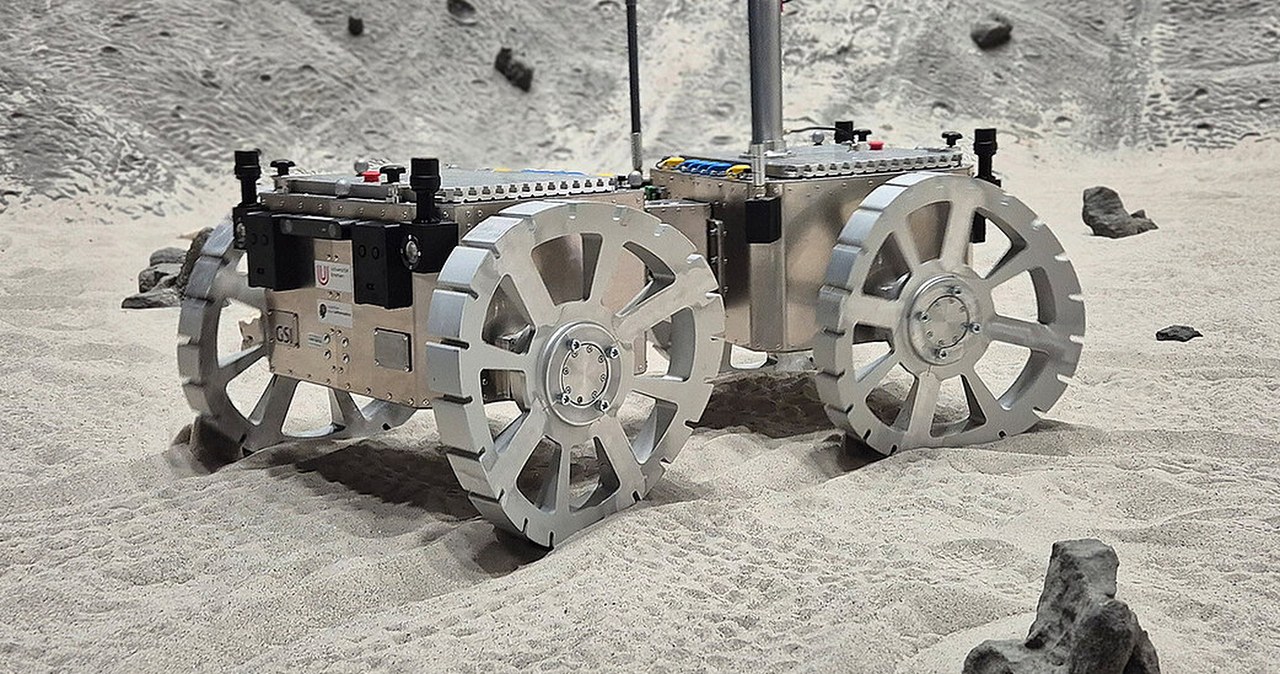
Researchers at the University of Würzburg, led by computer scientist Marco Schmidt, have developed an experimental rover prototype that moves less like a traditional vehicle and more like an organism. Inspired by the Scincus scincus—a lizard that “swims” through desert dunes with effortless grace—this new rover utilizes a unique wheel mechanism.
Instead of a standard rotational roll, these experimental wheels slice through sand in a rhythmic “figure-eight” motion. This mimics the undulating body waves the lizard uses to navigate granular environments. By generating both longitudinal and transverse forces, the rover effectively “swims” across the surface, leaving distinct, sinusoidal tracks behind it.
Sand behaves as both a solid and a liquid depending on the pressure applied to it. This “granular media” problem is precisely why standard wheels—designed for the hard-packed roads of Earth—often fail on the Red Planet.
Overcoming the “Wall-E” Problem
For years, roboticists have relied on traditional wheels or tank-like treads, similar to those seen in science fiction portrayals of space exploration. However, these designs struggle with “sinkage,” where the weight of the rover causes it to lose traction in fine Martian regolith. Early iterations of the new bio-inspired wheels were too heavy, increasing downward pressure and causing the rover to stall.
Current refinements are focused on optimizing surface geometry to reduce weight while increasing grip. The goal is to create a chassis that can navigate “mixed terrain”—transitioning from hard rock to loose, shifting sand without losing momentum or stability.
The Future of Robotic Mobility
While we are unlikely to see these “swimming” wheels on the next major NASA mission, the technology represents a significant shift in how we approach extraterrestrial mobility. By moving away from rigid, mechanical thinking and toward biomimicry, engineers are opening the door to more resilient, autonomous exploration.

If you’re interested in the intersection of robotics and biology, look into the field of soft robotics. It is currently one of the fastest-growing sectors for space exploration, focusing on materials that can deform and adapt to unpredictable environments.
Frequently Asked Questions
- Why can’t we just use regular tires on Mars?
- Martian sand is extremely fine, and loose. Traditional tires lack the surface area and specialized movement patterns required to prevent “digging in” or slipping on steep, sandy slopes.
- How does the “swimming” motion help?
- The figure-eight motion distributes force more effectively, allowing the rover to gain purchase on shifting grains rather than displacing them, which is what causes standard wheels to get stuck.
- When will this tech be used in space?
- The technology is currently in the experimental phase. Further testing is required to ensure it can handle the extreme temperature fluctuations and radiation levels of Mars.
What do you think is the biggest hurdle for future Mars missions? Is it mobility, power, or communication? Join the conversation in the comments below or subscribe to our space exploration newsletter for the latest updates on extraterrestrial engineering.