
Robotic Hands Get a Grip: The Future of Dexterity Lies in Fingernails
For decades, robotic hands have struggled to match the dexterity and adaptability of their human counterparts. A recent breakthrough, though, suggests a surprisingly simple solution: fingernails. Researchers at the University of Texas at Austin have developed a three-fingered robotic hand with rigid fingernails on soft material, dramatically improving its ability to handle everyday objects and tasks. This innovation isn’t just about picking up items; it’s a step towards robots that can seamlessly integrate into our lives, assisting with chores, manufacturing, and even delicate medical procedures.
The Problem with Soft Robotics
Conventional robotic hands often feature soft pads on rigid structures, providing a degree of grip but lacking precision. Whereas softness is crucial for conforming to object shapes, it can lead to instability, especially when dealing with curved surfaces or requiring a firm hold. A square-shaped fingertip, common in current designs, struggles with forces applied at angles. This limitation hinders robots from performing tasks that humans find effortless.
Inspired by Human Anatomy
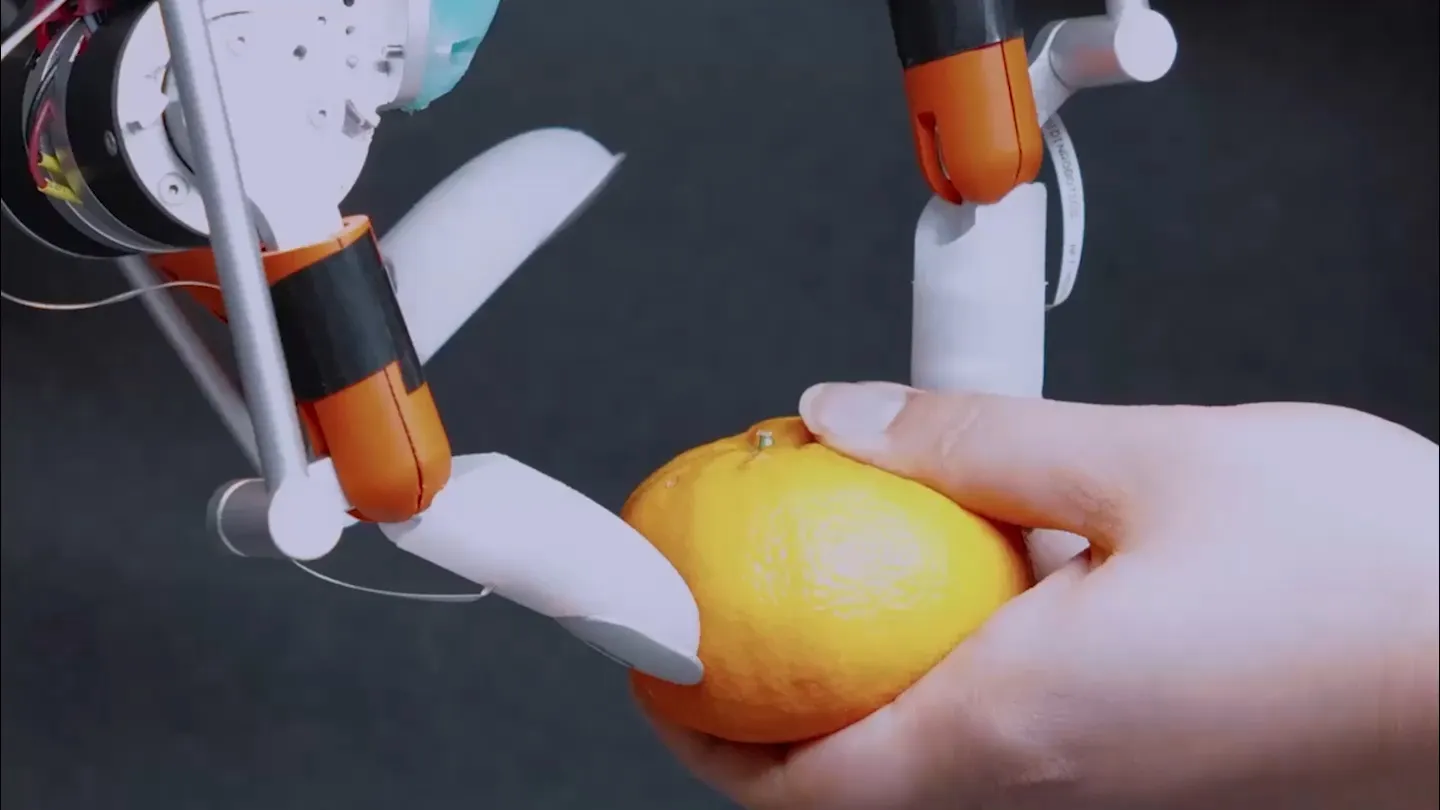
The key insight came from observing human fingertips. Our own nails provide rigidity to the soft tissue, allowing us to apply focused pressure and maintain a stable grip. The research team mimicked this design by wrapping a soft material around a finger “skeleton” and topping it with a rigid structure – essentially, a fingernail. This oval-shaped design proved significantly more versatile.
Testing the Latest Design
The robotic hand was tested on a variety of objects, including those with flat, outward-bulging, and inward-curved surfaces, while being pulled upwards. The results were clear: fingertips with nails demonstrated a stronger grasping force and a tighter grip. The nails were particularly advantageous when grabbing curved objects, preventing the soft fingers from deforming and losing their hold.
Beyond basic grasping, the nail-equipped fingertips excelled at more complex tasks. They successfully picked up single sheets of paper, opened sealed containers, grasped thin objects like coins and cards, and even flipped cards – tasks that proved impossible for the soft-fingered counterparts. The soft fingertips failed to establish contact with the edges of objects in these scenarios.
Beyond Grasping: The Expanding Capabilities of Tactile Sensing
This development coincides with advancements in tactile sensing, allowing robots to “feel” objects and adjust their grip accordingly. Coupled with the enhanced dexterity provided by fingernails, robots are becoming increasingly adept at in-hand manipulation. Recent research highlights the importance of “universal slip detection” in robotic hands, enabling them to anticipate and prevent dropped objects. This represents crucial for tasks requiring precision and reliability.
The Rise of Visuotactile Perception
Another exciting area of development is visuotactile perception, where robots combine visual information with tactile feedback to understand objects and manipulate them effectively. NeuralFeels, a new approach utilizing neural fields, allows robots to perceive objects through both sight and touch, leading to more natural and intuitive interactions. This technology is particularly promising for in-hand manipulation, where visual cues alone are often insufficient.
Lifelong Learning and Knowledge Preservation
The future of robotics isn’t just about better hardware; it’s as well about smarter software. Researchers are focusing on “lifelong reinforcement learning,” enabling robots to continuously learn and adapt from their experiences. Crucially, this involves preserving and combining knowledge gained from previous tasks, preventing robots from having to relearn everything from scratch. This is essential for robots operating in dynamic and unpredictable environments.
What’s Next?
The University of Texas team plans to extend this operate to a full robotic hand, incorporating more fingers and refining the design for even greater dexterity. The potential applications are vast, ranging from industrial automation and healthcare to assistive robotics for people with disabilities. As robots become more capable and adaptable, they will play an increasingly important role in our daily lives.
FAQ
Q: Will robotic hands with fingernails replace human workers?
A: The goal isn’t replacement, but augmentation. These technologies are designed to assist humans with tasks that are dangerous, repetitive, or require extreme precision.
Q: How durable are these robotic fingernails?
A: The materials used are being tested for durability and resistance to wear and tear. Further research is focused on creating fingernails that can withstand demanding industrial environments.
Q: What types of materials are used in these robotic hands?
A: The research focuses on combining soft, flexible materials with rigid structures. Specific materials vary depending on the application and desired properties.
Q: How does this technology contribute to AI reasoning?
A: Improved dexterity and tactile sensing provide robots with more data to process, enabling them to “reason” about objects and their environment more effectively, as pioneered by DeepSeek’s new AI approach.
Did you know? The human fingernail isn’t just for show – it plays a vital role in enhancing our tactile sensitivity and grip strength.
Pro Tip: Keep an eye on advancements in materials science. New, lightweight, and durable materials will be crucial for creating the next generation of robotic hands.
Want to learn more about the future of robotics? Explore our other articles on artificial intelligence and automation.